CV映像とCG合成
CV映像上で歩行者のCGが動いている動画をご覧いただけます。
電柱電線自動作成
電柱・電線認識3Dポリゴン自動作成、離隔計測の紹介動画をご覧いただけます。
技術紹介ダイジェストデモムービー
岩根研究所のテクノロジーをダイジェスト版でご覧いただけます。
CV映像⇒撮影方法 ⇒ 全周映像 ⇒ 揺れ止め ⇒ 緯度経度高度表示 ⇒ 3次元計測 ⇒ ロックオン表示 ⇒ 実写映像と3DCGの合成 ⇒ CVタグ ⇒ 実写対象物のアイコン化 ⇒ Active Link Vision ⇒ 超広角映像 ⇒ iiCosmo ⇒ RCG ⇒ リアルタイムCG合成 ⇒ 地図作成⇒次世代カーナビ
CV映像
弊社の技術の特長は、全周囲動画映像におけるカメラの位置と姿勢を高精度に求めることにあります。
道路付帯地物自動認識(GEO CVI)
リアルタイムに映像内の移動体のCV値(位置と姿勢データ)を検出し、それに合わせて3DCGを合成することができます。
機械地図によるリアルタイム自己位置標定
機械地図とは人間ではなく機械が見るための3次元ベクトル地図です。全周映像を三次元解析し自動的に生成可能です。
現実の映像と比較対照することにより従来のGPS等による測位では得られなかった非常に高精度な位置・姿勢の測定が可能になります。また、機械地図に埋め込まれた情報を現実の映像に高精度に重ね合わせることができます(AR,実写カーナビ等)。
標識自動認識
CV技術+機械学習(開発中)による道路構造物自動認識
電柱認識システム
電柱を認識し、映像上と地図上の両方にその位置を自動的にプロットします。
認識した電柱は一覧表示され、選択するとそこに直接ジャンプし、3D座標も表示されます。
電柱を認識するだけではなく、その3D座標を演算表示ができるところが特長です。
電柱のタグはそれぞれ編集可能で、傾きや方位データも取得できます。
移動体軌跡解析
移動体から移動体の軌跡を解析
移動体から見た移動体解析
移動体から移動体の位置・速度・加速度・姿勢を自動計算します。
移動体から解析する移動体の位置・速度・姿勢など。
PRMによる カードの認識
これは岩根研究所により作成された、カード認識システムのデモで、PRM技術を示すものです。
PRMとは「Parts Reconstruction Method」の略で、全く新しい考え方による画像認識変換表示装置です。
PRMは画像を、構成する複数の要素として認識し、それを部品に分解し、その部品を送信側の持つ部品庫の中から選択し、その名前と配置をコードとして受信側に伝送します。受信側は、そのコードより、受信側の持つ部品庫から適合する部品を選択した上、三次元的に配列し直し、自由視点で表現します。PRMシステムでは必ず送受信側共に部品庫を持ち、関連するさまざまな部品が3DCGとして用意されています。
本デモでは3次元カメラで撮影されたトランプのカードが、PRMにより部品として認識され、部品庫の中の部品IDと配置に変換された後、サーバーサイドPCからクライアントサイドPCに伝送されます。クライアントサイドPCでは伝送された情報が、クライアントサイドPCの部品庫の情報をもとに、3次元空間にて再構築されます。ユーザーは自由に視点を変更でき、ブラックジャックゲームを行います。
機械地図によるAR(拡張現実)
機械地図を利用したAR(拡張現実)のデモムービーです。機械地図は、3Dベクトルマップと名付けられたカメラベクトル画像データベースから自動的に生成されます。
このムービーでは、機械地図は、ルービックキューブに対して生成されています。(それぞれのルービックキューブを別の建物と認識しています)
3次元空間内での機械地図とルービックキューブのマッチングによりモバイルデバイスの高精度な位置決めを行います。カメラ位置の移動後も正確な位置を保ち、機械地図を非表示(バックグランドのみでの稼働に設定)にしても、ペンギンのCGは3D空間の中で正確に動き続けます。
超広角映像
新開発「スーパービュー300」による画角300度の超広角映像の特徴は、単に広い範囲が見えるというだけではなく、我々の実際の視覚体験にきわめて近い臨場感と三次元把握が出来ることにあります。
画面に顔を近づけて、片眼で画像の真ん中付近を見てください。実体験に近い臨場感を味わうことが出来ます。画面に顔を近づけることは画角が現実の画角に近づくことを意味します。また片眼で見ることの意味は、平面的画像による現実とは異なる両眼視差を排除し、運動視差を優先させて視覚系の情報処理の三次元的把握を活性化させることにより、大画面効果と相まって優れた臨場感を得ることができることにあります。
極超広角映像
進化した広角映像。従来の超広角映像の視野300度に背面60度を加えた全周囲を表示します。
撮影には全周囲カメラが必要ですが、撮影した映像は極超広角映像・超広角映像のいずれにも使用可能です。
また、用途に応じて範囲を変えることも出来ます。
こちらの製品は広角映像への加工を受託いたします。
自動運転シミュレーション
画像による自動運転シミュレーション。CVMapを背景に自己位置標定を実施し、対象物認識(標識や看板等)・障害物認識も三次元で行います。
加えて同時に6変数で移動体認識を行い各種自動運転の為の必要データを集め、運転条件を加味して運転パラメーターを指示し事前に撮影しておいた映像に自車車両位置をCGで表示します。
本動画上に表示されている上部の画面は事前に撮影しておいた映像に自車車両位置をCGで表示しています。
下の画面は実際の車両の映像です。この画面で見えている自車車両位置が上の映像内にCGで表示されています。
CVMapによる自己位置標定
あらかじめ撮影した映像から特徴点とその3次元位置を計算し保存しておいた地図(CVMap)を用意します。その後、魚眼レンズで撮影・抽出した特徴点を比較し、自己位置標定を行います。
加えてIMUの慣性航法出力を使用して補正も行いますので高精度な自己位置標定が可能になります。
その結果、GPSが受信出来ないところでも自己位置標定が可能になりました。
また、この自己位置標定は車載PC上でリアルタイムに確認が出来ます。
リアルタイムCG合成
リアルタイムに映像内の移動体のCV値(位置と姿勢データ)を検出し、それに合わせて3DCGを合成することができます。


次世代カーナビ
車に搭載されたカメラからのリアルタイム映像から得られる三次元座標と、三次元地図との座標を比較する事によって、GPSを用いずに現在の座標をカーナビゲーションで表示させることが可能です。
その上、相対位置と姿勢はGPSで得られる情報よりも高い精度であることが特徴です。
- 相対精度 ±15cm
- 姿勢精度 0.1度
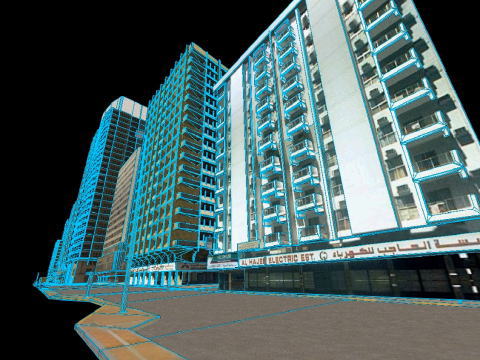
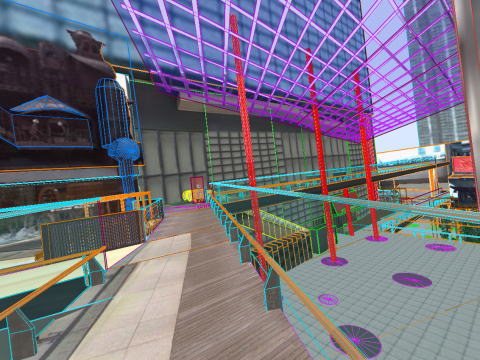
RCG - Real Computer Graphics
全周カメラを車載、航空機(ヘリコプター等)に搭載し、撮影した全周映像から地形の3次元モデルを作成します。
本技術は、GPS、IMUを必要とせず、すべての処理を動画像からのみ行い、正確な3次元モデルを作成できることが大きな特徴です。
- 全周囲カメラのみを使用し安価でリアリティのある3DCGを作成
- 映像と3DCGの合成によるわかりやすいコンテンツ提供
- 全周囲ビデオ映像から視点に応じた最適なテクスチャを選択しよりリアルな表現が可能
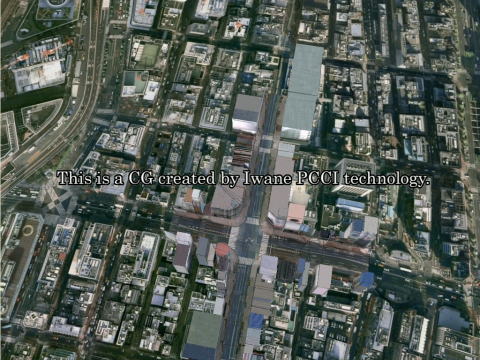
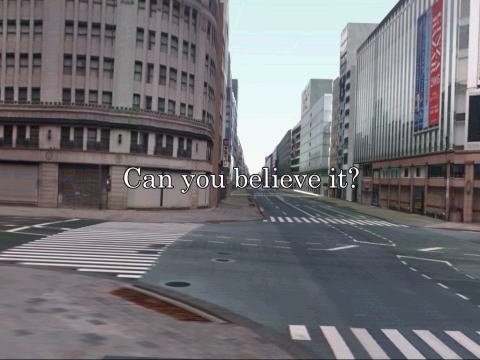
CV座標統合による空撮CGと地上撮CGの結合
CV座標統合によって、空撮映像と地上撮影像とから一つの全体CGを生成することに成功しました。CV座標統合は当社によるオンリーワンの技術です。
空撮映像と地上撮映像を矛盾なく結合できるのはこの技術を置いて他にありません。
Single Viewer
家庭用ホームビデオ等で撮影した映像からカメラ位置を解析し、3次元情報を取得することにより、映像の揺れ(手ぶれ)を止めたり、CGを映像内に配置することが可能となります。
- 揺れ止め : 撮影時のカメラの3次元の揺れ(手ぶれ)を高精度で検出し、映像の揺れを止めて表示します。
- CG合成 : 2次元の映像でありながら、任意の3次元座標を計算することができます。計算した位置にCGを配置し、配置したCGは映像とシームレスに連動します。
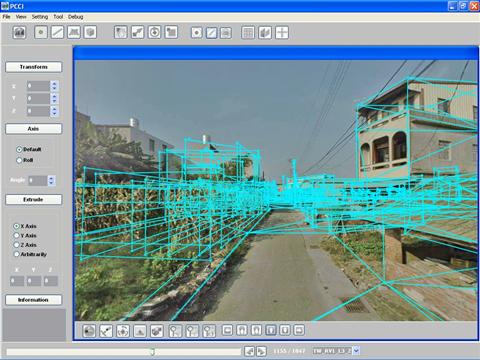
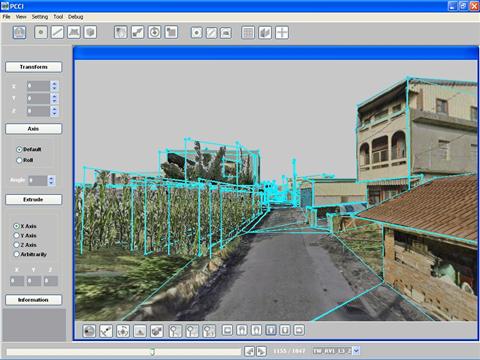
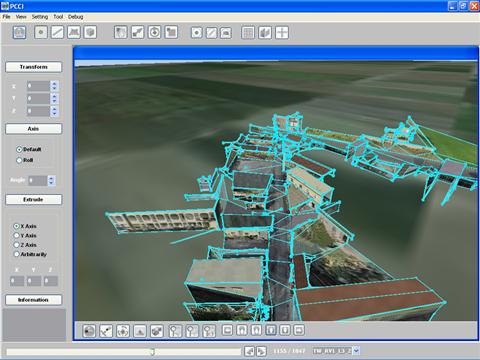
CVCG Modelerから任意視点の実写3Dモデルを生成
実写映像からPCCIを作成すれば、3DCGと同じ扱いで実写映像3Dコンテンツが自由に作成できます。任意のアイパス(カメラパス)、任意の視点方向、任意の視差、任意のコンバージェンスを自由に設定できます。
視点数は自由設定できるので、両眼立体視のみならず、多視点3D方式にも対応します。実写時の映像のCV値からは、実写時と同じカメラパスで、3Dコンテンツを作成できます。
PCCIの可能性がまた一つ広がりました。
2D PCCI(自動連続結合画像)展開図
連続する画像から同一方向の短冊画像を切り取ってつなぎ合わせたもので、無限に長い連続画像が全自動で生成されます。
道路面、右側面、左側面の2D PCCI画像をつなぎ合わせ、町並みを立体的に再現しました。当社CV技術によりはじめて可能となった待望の画像です。高精度のラインセンサ画像として利用できます。応用範囲は広く、皆様からのお問い合わせをお待ちしています。
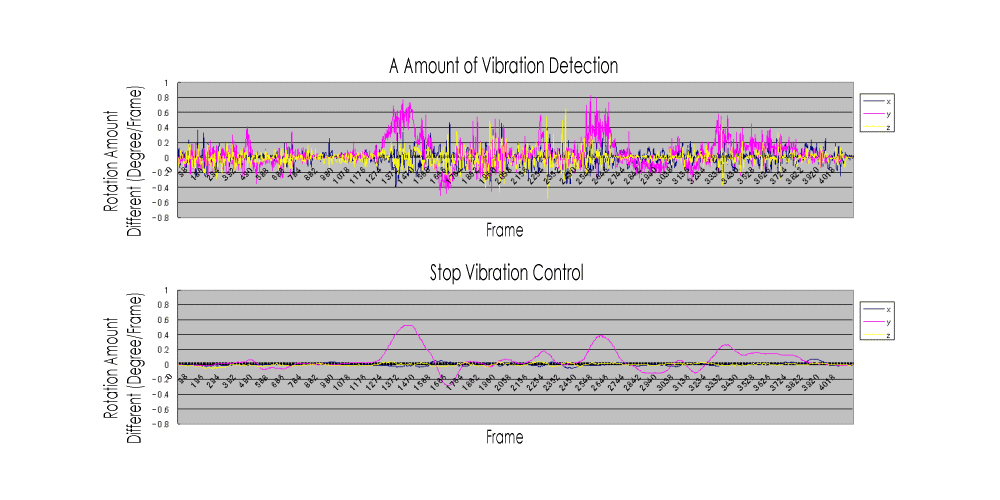
揺れ止め
CV演算により、撮影時のカメラの三次元の揺れを高精度で検出、映像内の揺れを補正します。
また、揺れデータから映像の揺れを止めて表示することが可能となり、また将来は、リアルタイムで取得した揺れデータにより、カメラが固定されている車両自身を制御して、車両の揺れを止めることも可能です。







")
")



")
")
")
