CV映像とは
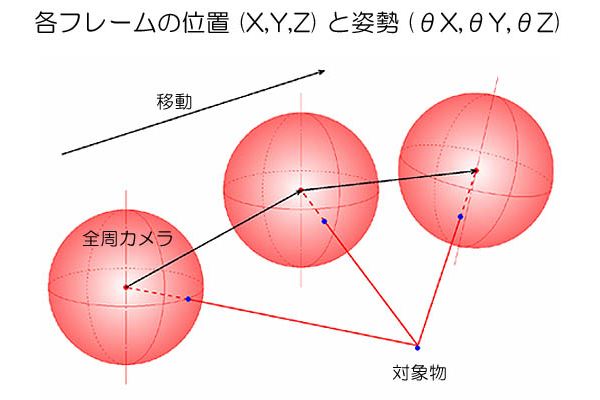
弊社の技術の特徴は、全周囲動画映像からカメラ位置を自動的に高精度に求めることにあります。弊社では、全周囲動画映像を360度の水平方向のみでなく仰角俯角映像も持つことから、4πビデオ映像と呼んでいます。また、この4πビデオ映像を画像処理し、4πビデオ映像から三次元情報を取得できる三次元化映像をCV映像と呼んでいます。
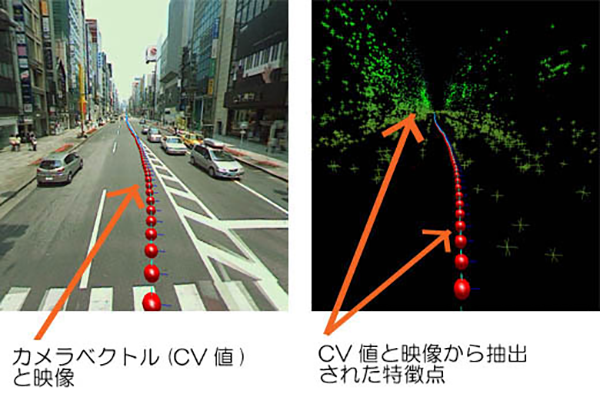
CVとは、カメラベクトルのことです。また、このカメラベクトルを求める演算をCV演算と言います。また、CV値とは撮影カメラの6自由度を持つカメラベクトルを意味し、映像の各フレームの三次元位置を三次元姿勢(CV値)を意味します。
CV値はGPSとIMUからでも取得できますが、弊社は4πビデオ映像を用いて、カメラの位置と姿勢を数学的解析により精度の良いCV値を求めています。
4πビデオ映像はまた映像の各ピクセル座標がカメラ中心からの方向を示しており、古典的な三角測量の線形代数の範囲で処理可能であり、しかも演算に必要な特徴点を全方向に対して取得できるので演算精度が向上するという優れた特徴を持っています。
さらに特記すべきはCV映像を取得するには複数カメラは必要なく、単一カメラで良いということです。CV演算は原理的に単一カメラで処理が出来るため、装置がきわめて単純化されるという優れた特徴があります。
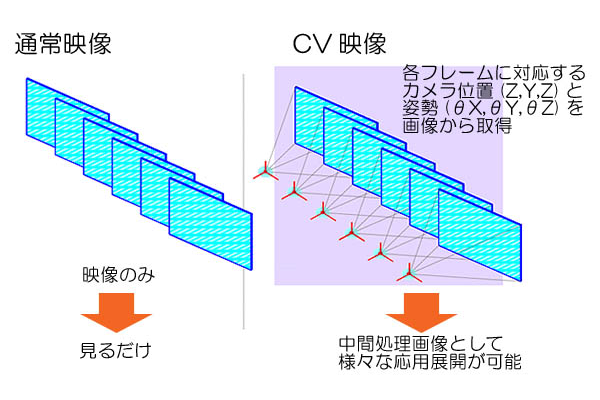
この方法により映像の各フレームに対応するカメラ位置(X,Y,Z)と姿勢(θx,θy,θz)の三次元データが映像の全フレームについて求められ、それが映像データに付加され、新しい概念のCV値付加全周映像、即ちCV映像を取得しています。
ここで映像の各フレームがCV値を持ったことで映像はいつでも三次元化が可能な状況になっています。このことからCV映像を2.5次元映像と呼ぶこともできます。
全フレームのカメラ位置と姿勢が既知となったことで、カメラ移動近傍の対象物を広範囲の視角からとらえ、対象物の三次元座標や、三次元形状を座標と共に読み取ることが可能となります。又映像があたかもCGであるかのように、様々な映像の加工が可能になるという優れた特徴を持っています。